| BOTZILLA | ||||
| Showing 1 - 9 of 9 pictures | ||||
 m68332.jpg The Motorola 68332 main board (NF300). |
 nf300_1.jpg M68332 main board (NF300) + VHF application board. |
 bdm.jpg BDM Interface: used to program and debug from a PC to the NF300. | ||
 interface_I2C.jpg I2C/PC Serial Port Interface: very usefull to check the status of the PIC used to control the 2 motors during a session. There is a small I2C target (PCF8574) for I2C tutorial and hardware checking. |
 robot_v01.jpg An overview of our first robot. |
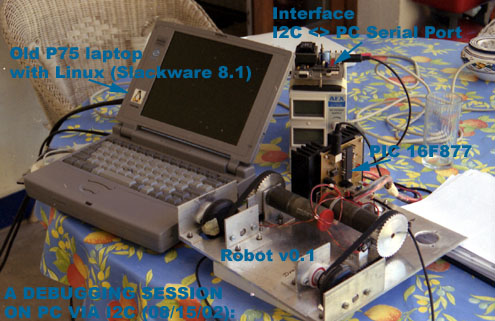 debug_session_0815.jpg A "debugging session" on the PIC by using the I2C Bus to monitor the PIC status (the old dirty printf debugging style). | ||
 motor_control_card.jpg An overview of the motor control from the PIC 16F877. |
 program_session.jpg To program the PIC, unplug the bridge, and plug the programer. It's a simple way to ensure that the PIC is disconnected from the card during the transfer. |
 motor_and_wheel_fixation.jpg | ||
| Showing 1 - 9 of 9 pictures | ||||